Le bus CAN
En quelques mots
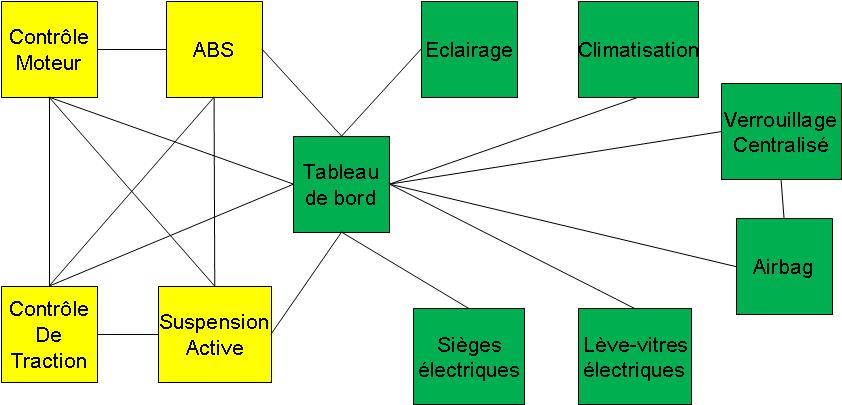
Le bus CAN est une application d'une approche connue sous le nom de multiplexage, et qui consiste à raccorder à un même câble (un bus) un grand nombre de calculateurs qui communiqueront donc à tour de rôle. Cette technique élimine le besoin de câbler des lignes dédiées pour chaque information à faire transiter (connexion point-à-point).
Il s'agit d'un bus de terrain. Il sert a relier principalement des équipements du type capteurs, actionneurs etc... Il est principalement utilisé sur des milieux
ayant des fortes contraintes. Plus specifiquement, nous le trouvons sur les automobiles.
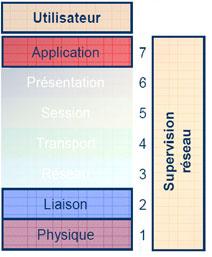
Sa conception réseau est une version simplifiée du modèle OSI. En effet, nous n'aurons pas besoin d'interconnecter différents type de réseaux
Ce protocole a été inventé dans les années 80 par Bosch et democratisé dans les années 90 afin de répondre aux besoins de l'industrie automobile.
L'utilité d'un BUS
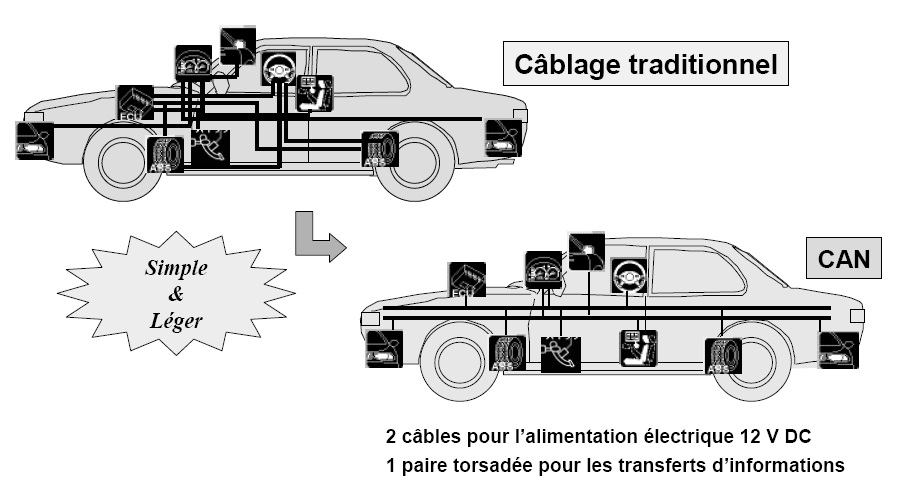
L'introduction des bus multiplexés (principalement le CAN) dans l'automobile avait pour objectif de réduire la quantité de câbles dans les véhicules (il y a jusqu'à 2 km de câbles par voiture), mais elle a surtout permis l'explosion du nombre de calculateurs et capteurs distribués dans tout le véhicule, et des prestations correspondantes (baisse de consommation, dépollution, sécurité active/passive, confort, détection des pannes
), tout en n'augmentant pas trop les longueurs câblées.
En effet, devant la grande quantité de cable utilisé avec du point a point, la fiabilité s'en trouvait lésée car les pannes devenaient de plus en plus difficiles à déceler.
Enfin, l'utilisation d'un BUS à des effets benefiques sur le coût de production d'une automobile. Le prix du cuivre (servant a fabriquer les câbles) ne cessant d'augmenter, cela pousse les constructeurs à utiliser cette technologie.
Caractéristiques
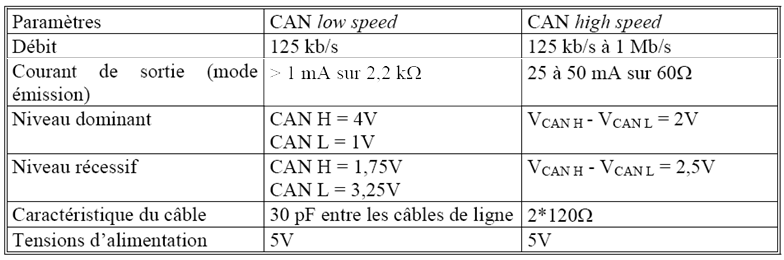
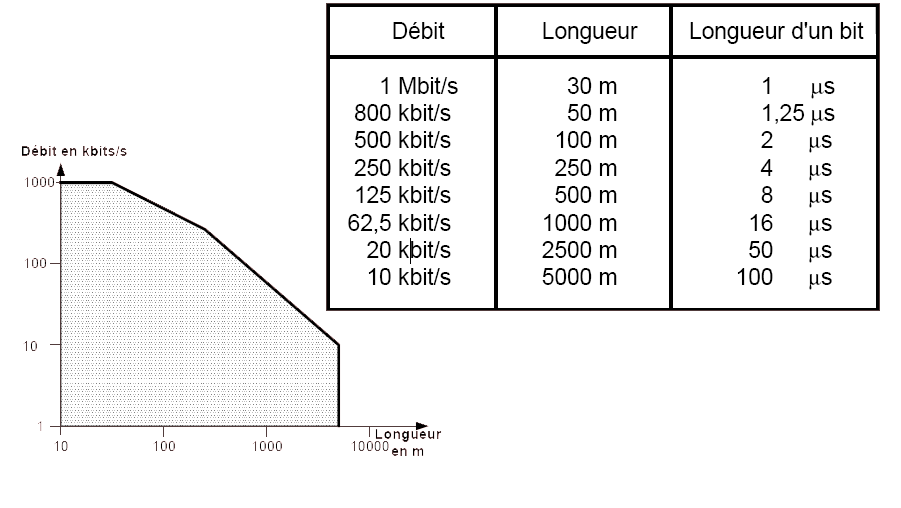
Ci-dessous, un tableau recaputilatif des caracteristiques éléctriques de ce BUS ainsi que du debit théorique maximal:
La norme CAN ne spécifie pas de couche physique. Différentes implémentations sont donc possibles : filaire, HF, infrarouge, par fibre optique, etc. Mais toute implémentation doit respecter le principe des bits dominants / récessifs. Chaque noeud doit pouvoir présenter sur le bus un bit appelé dominant (0 logique) et un bit appelé récessif (1 logique). Les implémentations doivent aussi respecter la règle suivante : si 2 noeuds présentent des niveaux logiques différents, le bit dominant s'impose.
Le bus can accuse une forte baisse du debit en fonction de la distance. Cela montre que se bus de données n'a pas pour but la liaison longue distance (interconnexion entre batiment ou autre). Ci-dessous, on peut voir un graphique representant l'affaiblissement du débit en fonction de la distance:
Topologie
Il s'agit d'une topologie en BUS. C'est à dire que tout les noeuds sont connectés au même cable. L'avantage d'utiliser un BUS est une réduction significative du cablage. Cela permet également d'insérer un noeud comme on le souhaite dans l'architecture sans avoir a déclarer celui-ci.
Le principal désavantage de cette technologie est la défaillance de l'ensemble des noeuds en cas de rupture d'un câble
Ci-dessous, voici un schéma qui montre l'opposition entre un cablage tradionnel et un ensemble de noeuds autours d'un BUS: