


My research interests mainly focus on real time motion capture and shape
matching, and associated research fields :
- Real time and markerless 3D motion capture:
- automatic initialization (no temporal information)
- articulated shape tracking
- Graph matching
- Thinning algorithms and their speed optimization
- 3D shape descriptors and comparison
- Indexation of poses for 3D articulated shapes
3D Motion Capture : Generic Initialization
|
|

|
Motion capture is used in several areas (HMI, animation, video games). My
works focus on markerless and modelbased
approaches using a
multicamera system.
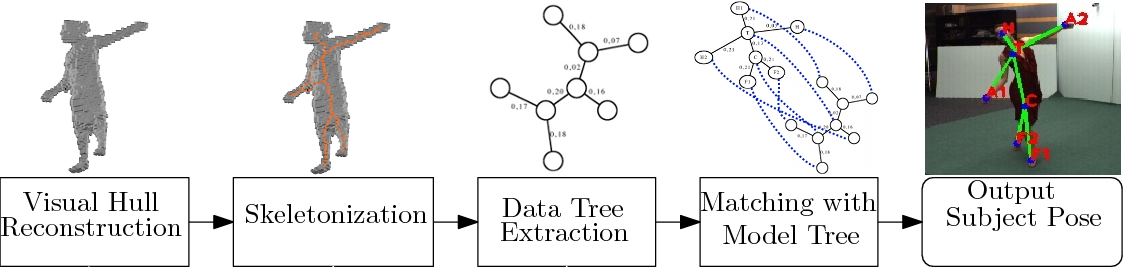
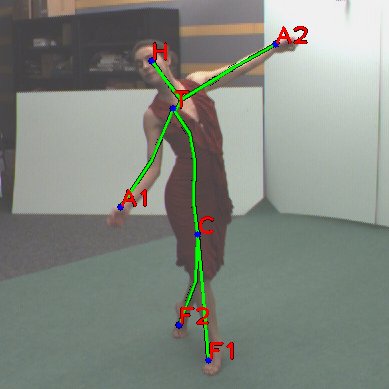
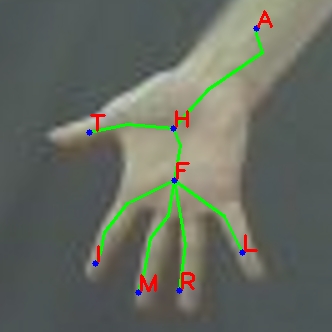
Such an approach is most often composed of two main steps: initialization, consisting in finding the initial pose of the subject, and tracking, consisting in computing the current pose from the previous ones. In the literature, the initialization is most often done manually by the user, or by requiring a constraining pose for the subject. During my PhD thesis, my works have been concentrated on the design of an automatic real time markerless initialization method easily adaptable for any kind of subject (human, hand, animal, ...). This method takes as input a very simple and concise topological description of the subject. This description consists of an acyclic graph (unrooted tree) where each vertex represents a part of the subject and the edges represent the links between these parts. Our method is built on the following pipeline. We start by a visual hull reconstruction of the subject from the multiview system. Then, we extract the topological information of the shape, first by using an efficient thinning algorithm and in a second time by building a graph from the resulting skeleton, where each vertex represents the 3D position of an intersection or ending point of the skeleton. The edges represent the links between such points in the skeleton. The pose estimation is finally done by finding the best matching between the model graph and the one extracted from the skeleton. |
Graph matching
|
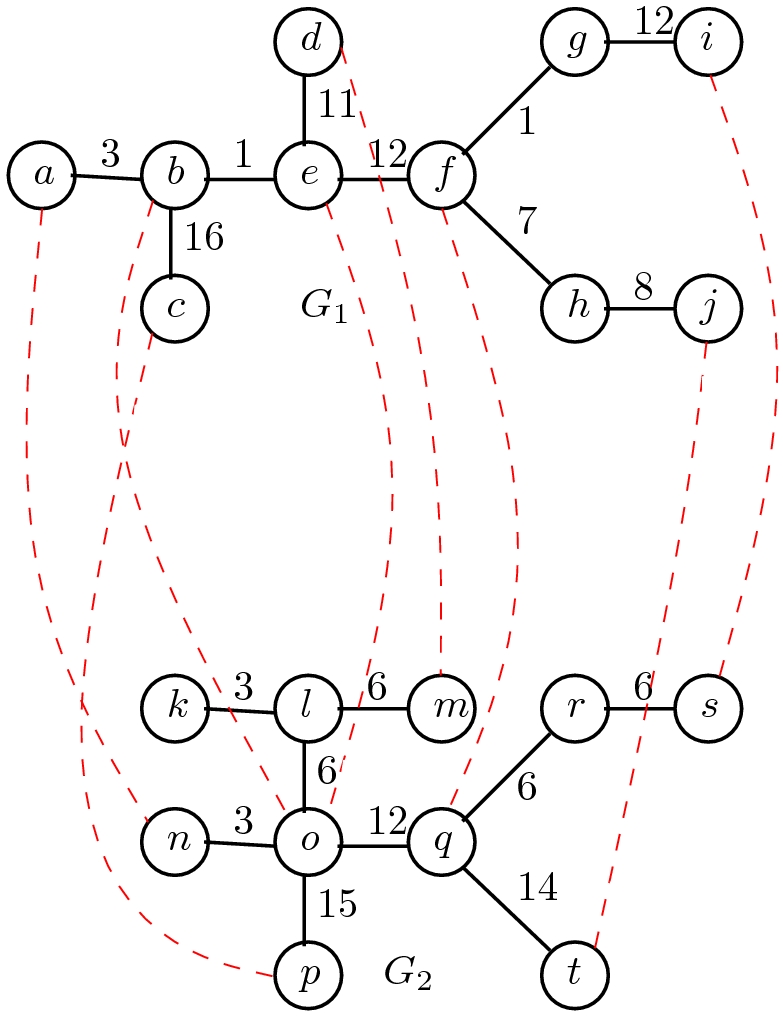
The graph extracted from the skeleton can contain different kinds of specific
noises, due to its acquisition, e.g. the split of an edge representing a limb of
the subject into several parts. Such noises should be taken into
consideration during the matching process. For this purpose, we have
defined a new kind of editbased
distance and mapping, the
homeomorphic alignment, and developed efficient algorithms that
compute it. Then we proposed a variation of homeomorphic alignment, called the asymmetric homeomorphic alignment, more adapted for our specific application and improving both the speed and the robustness of the matching for our initialization method. |
|
Thinning algorithms
|
Thinning algorithms are required for our initialization method, in order to
efficiently extract the topological information of the subject. Their
computation have to be as fast as possible in order to satisfy the real time
constraint. For this purpose, I did during my PhD thesis two different
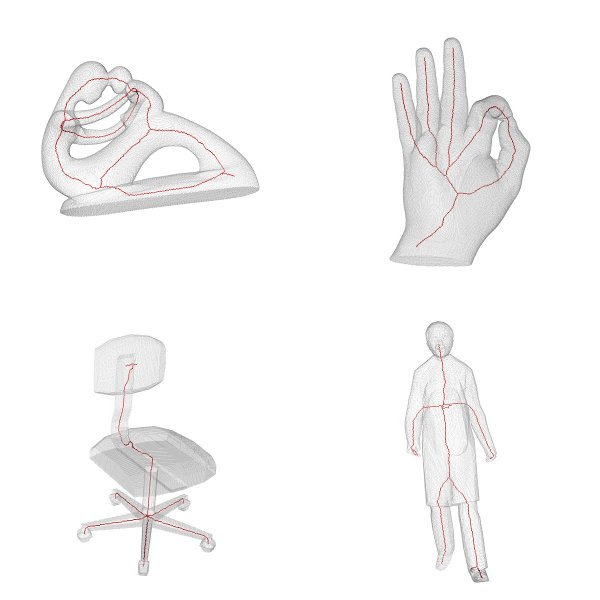
works on topological thinning. My first work on thinning focused on the generic speed optimization, usable on a large set of algorithms, based on the reformulation of deletion tests. In a second time, I have defined a new thinning scheme based the preservation of isthmuses, which is fast and produces skeletons with low amount of noise. This scheme can provide both surface and curvilinear skeletons. I am currently finishing the redaction of a journal paper on a reformulation and a framework allowing the efficient computation of a large panel of thinning algorithms on multicore architectures. |
Description and comparison of 3D shapes
|
During winter 2010, I had the pleasure to supervise the research of Tomoki
Hayashi, a student of Keio University (Japan) for the conception of a new
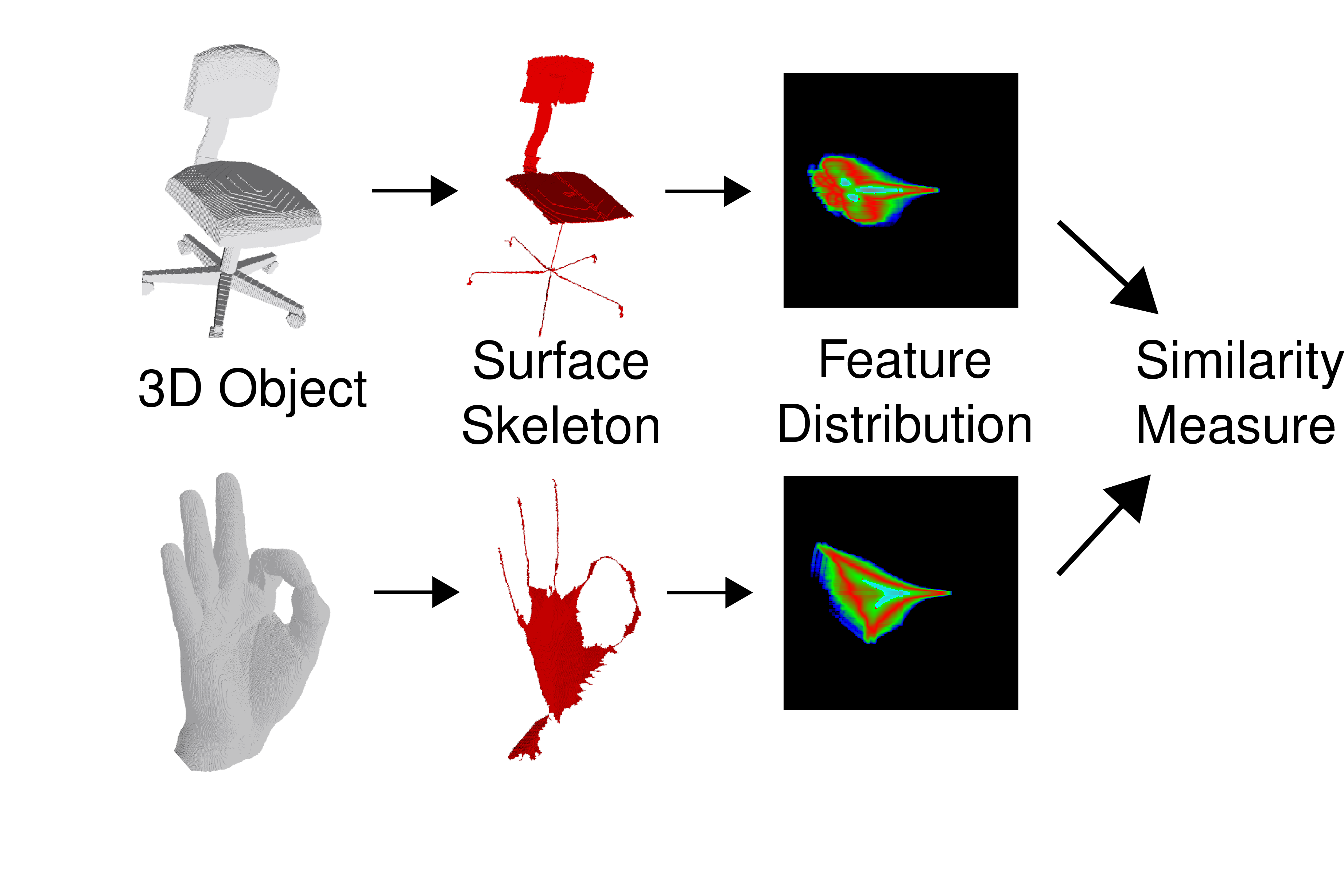
method for description and comparison of voxelbased
3D shapes. The first step of our method consists of extracting the surface skeleton from the considered object. For each pair of skeleton points, we compute a couple of measures. Then we compute the distribution of these couples, which is representative of the shape. Such distributions are interesting, since they are cheap in memory space, robust to affine transformations and surface noise and fast to compare between them. These properties provide an efficient indexation and research of similar shapes. |
|
